机器人机器视觉系统是什么?
机器人机器视觉是机器人进行只能操作的一项条件。虽然现在智能机器人的应用已经较为频繁了,但是在工业领域中还是一项有待研究的技术。目前机器人机器视觉技术存在着很多的不确定的问题,需要我们在工作的过程中去不断解决。

目前,机器人机器视觉技术所要解决的问题就是在面对一些操作条件恶劣的情况下,比如光源不强,作业精度要求高、作业产品之间存在障碍的时候要提高精度与准确度。主要要分析一下机器人机器视觉技术到底是怎么实现这些问题的转化的。
机器人机器视觉系统是什么?下面就主要为大家介绍一下这个系统所涉及到的一些主要技术和实现过程。
机器人机器视觉系统所涉及的技术
机器人机器视觉系统所涉及的两个主要技术就是动态图像社区与场景跟踪技术和场景和目标的视觉感知和准确测量技术。
(1)动态图像社区和场景跟踪
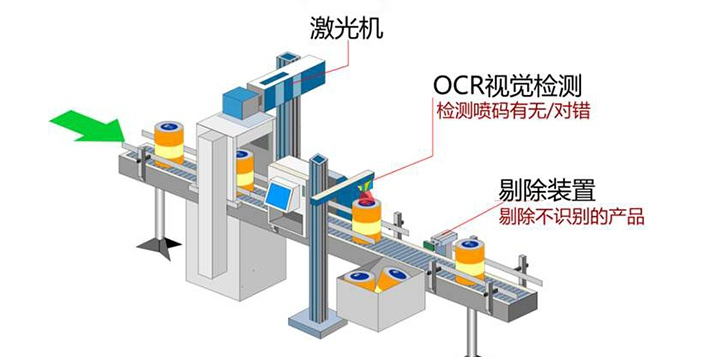
在这个技术中,首先我们要根据定位物品确定摄像机的位置和朝向,可以采用自带的光源,如果自带的照明环境不是提别理想的话,就设置较优设定。在一切都准备好的情况下,有涉及到摄像机参数的标定和在线自动适应控制,对场景进行一系列的追踪,评定,看产品是否合格。
(2)场景和目标的视觉感知和准确测量
会对作业区域中的作业目标进行视觉特征的提取和视觉感知,知道所要感知物体的具体位置之后,利用准确视觉进行测量和跟踪,得到产品的一些特征之后,形成三维形状数据,与标准值进行对比。
那么,机器人机器视觉技术是怎么实现的。
该技术涉及到的视觉信息处理算法主要分为图像采集、图像预处理、图像目标分割、提取、三维恢复等等。通过在线识别与三维恢复建立模型,从而来识别物体,进行相关的操作。